Publications
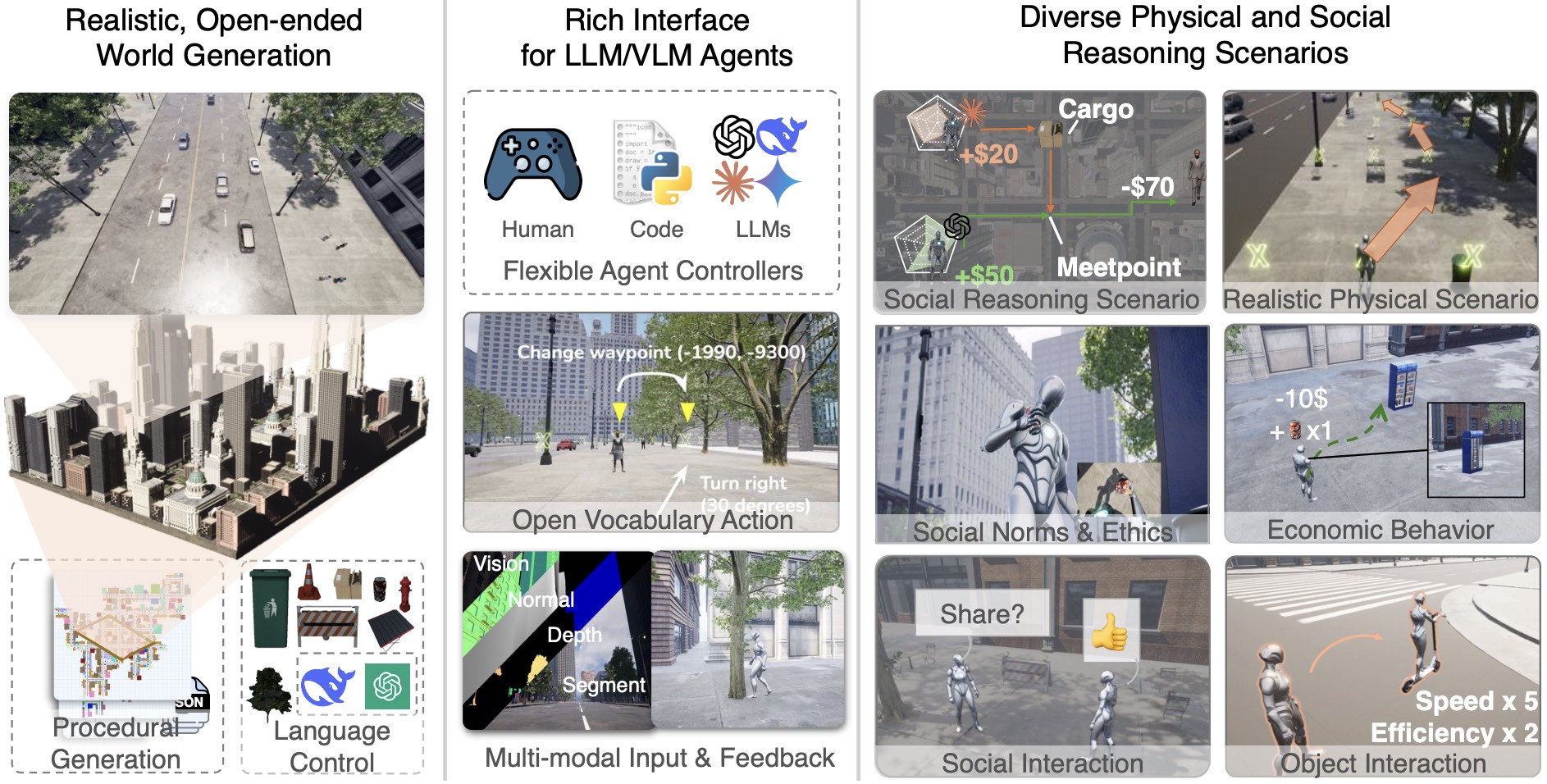
We introduce SimWorld, a photorealistic simulator for large-scale multi-agent interaction, supporting procedural generation and multimodal benchmarks.

Synthesizing Photorealistic and Dynamic Urban Environments for Multimodal Robot Navigation and Collaboration
This work proposes a pipeline to procedurally generate dynamic and realistic urban worlds for robot navigation tasks.